
|
Les capteurs utilisés sur
notre robot sont composés d'une diode émettrice infrarouge et d'un
phototransistor infrarouge. Soit ces éléments sont séparés, soit ils sont
regroupés dans un même boîtier mais le principe reste le même, dans notre cas
ces deux éléments sont regroupés en un seul bloc. Ils sont au nombre de deux.
Voici le schéma correspondant au fonctionnement d'un capteur :
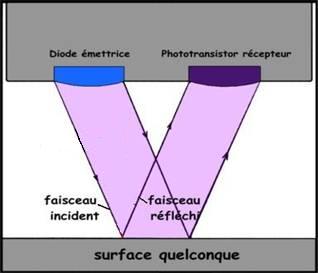
La diode émet de la lumière infrarouge sur une zone définie
qui réfléchit ou non le faisceau sur le phototransistor.
Un transistor NPN ou PNP se contrôle grâce au
courant de base Ib. Dans le capteur de notre robot, c’est un phototransistor, c'est-à-dire
qu’il sera contrôlé par la lumière réfléchie.
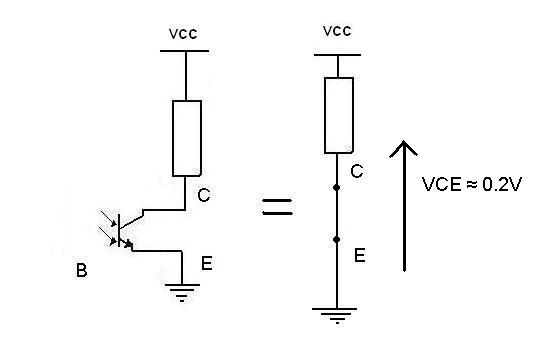
-Sur
une surface blanche la lumière est fortement réfléchie, ainsi le phototransistor
est saturé. Dans ce cas le modèle équivalent du phototransistor est un
interrupteur fermé (entre C et E).
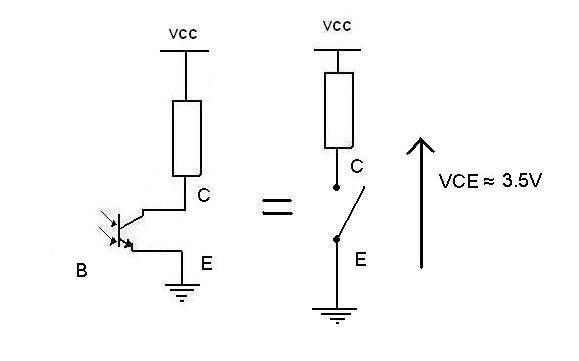
-Sur une surface noire, la lumière n’est presque pas réfléchie ainsi le phototransistor est donc bloqué. Dans ce cas, le modèle équivalent du phototransistor est un interrupteur ouvert (entre C et E).
| Sommaire |