
|
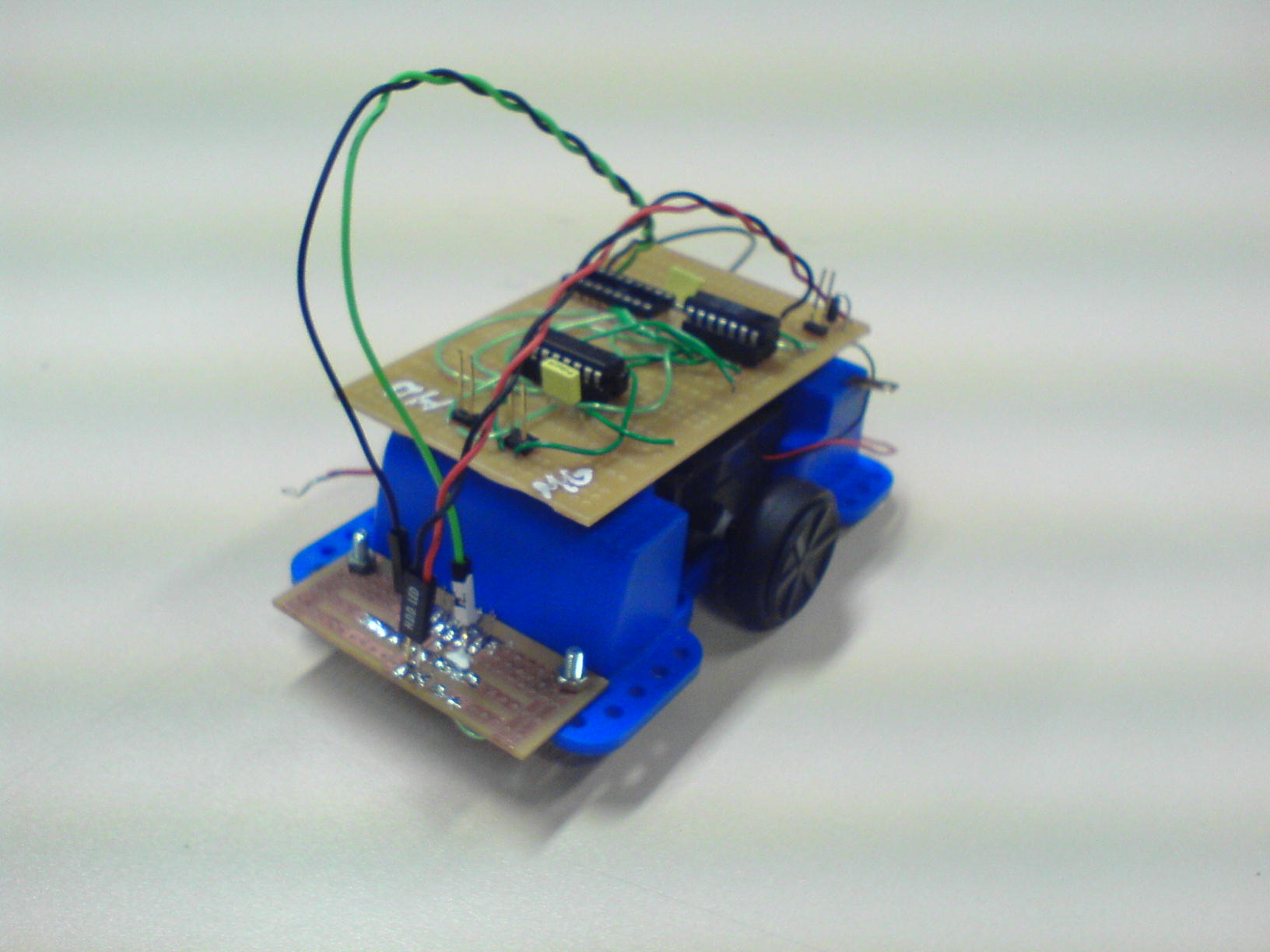
Le corps de
notre robot se compose en deux
parties : le châssis et deux moteurs alimentés par 4
piles 1,5 volts, soit
une tension équivalente à 6 volts. Ce support est fourni
dans l'état et est près a recevoir un circuit
électronique.

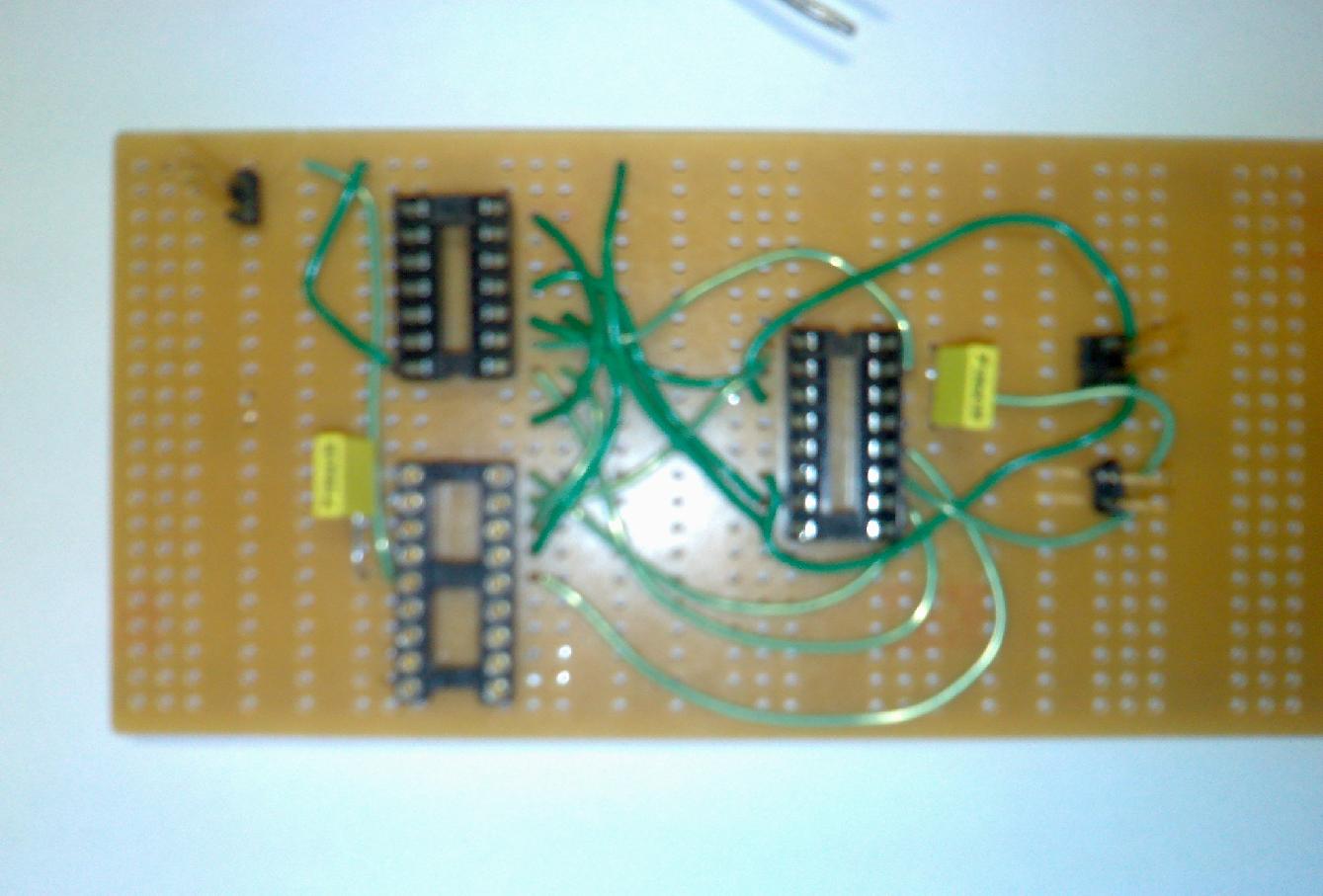
1. un pic ;
2. un inverseur ;
3. un double pont en H ;
4. deux condensateurs ;
5. une diode Schottky.
1. Le pic est un
microcontrôleur contenant le programme préalablement créé. Dans ce cas, le pic
sert à contrôler les moteurs en fonction de l’évaluation des capteurs qui
réagissent à la présence d’une la ligne noire. (Voir partie programmation)
2. L’inverseur est une porte
non. (Voir partie puissance)

3. Un pont en H est un
composant qui sert à utiliser un moteur dans les deux sens, sur notre robot il
est double afin de pouvoir contrôler les deux moteurs a la fois. (Voir partie
puissance)

4. Les
deux condensateurs servent à protéger les composants contre les parasites.
5. La diode Schottky sert à réduire
la tension et protéger les composants en cas de branchement inverse.

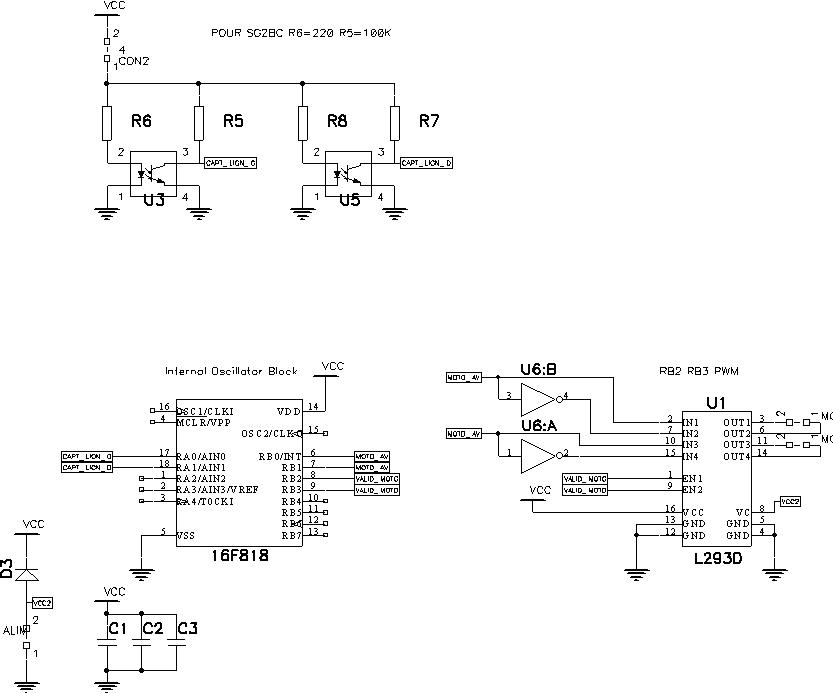
1. deux optocommutateurs réflectifs ;
2. deux résistances 220 ohms ;
3. deux résistances 100 kilo ohms.
1. Les deux optocommutateurs
réflectifs sont les capteurs de ligne. (Voir caractéristiques des capteurs)

2. Les deux résistances 220 ohms
sont utilisées pour avoir une intensité correcte pour les capteurs.

3. Les deux résistances 100 kilo
ohms permettent de limiter le courant en fonction de la luminosité détectée.
(Voir tests capteurs)
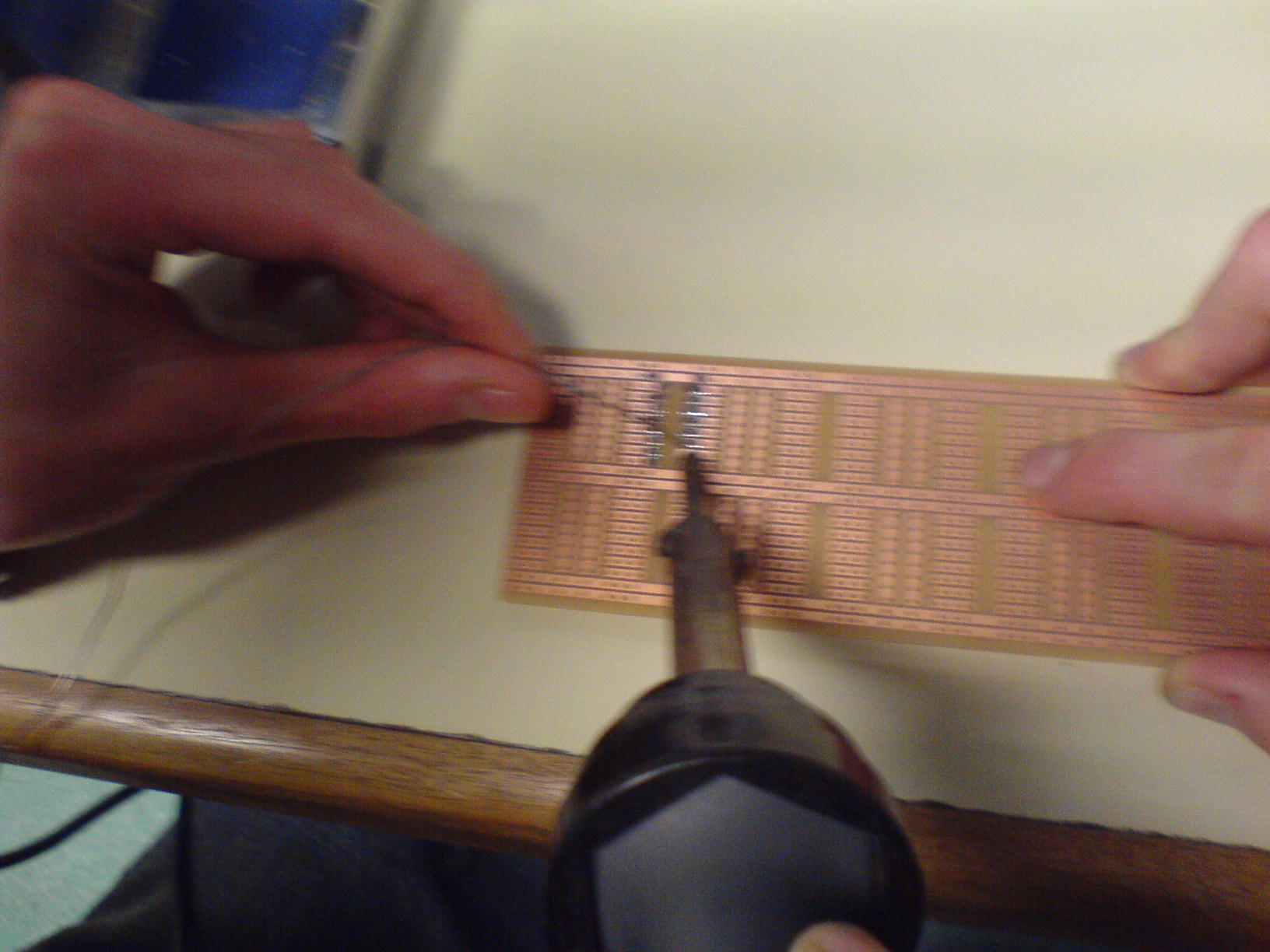
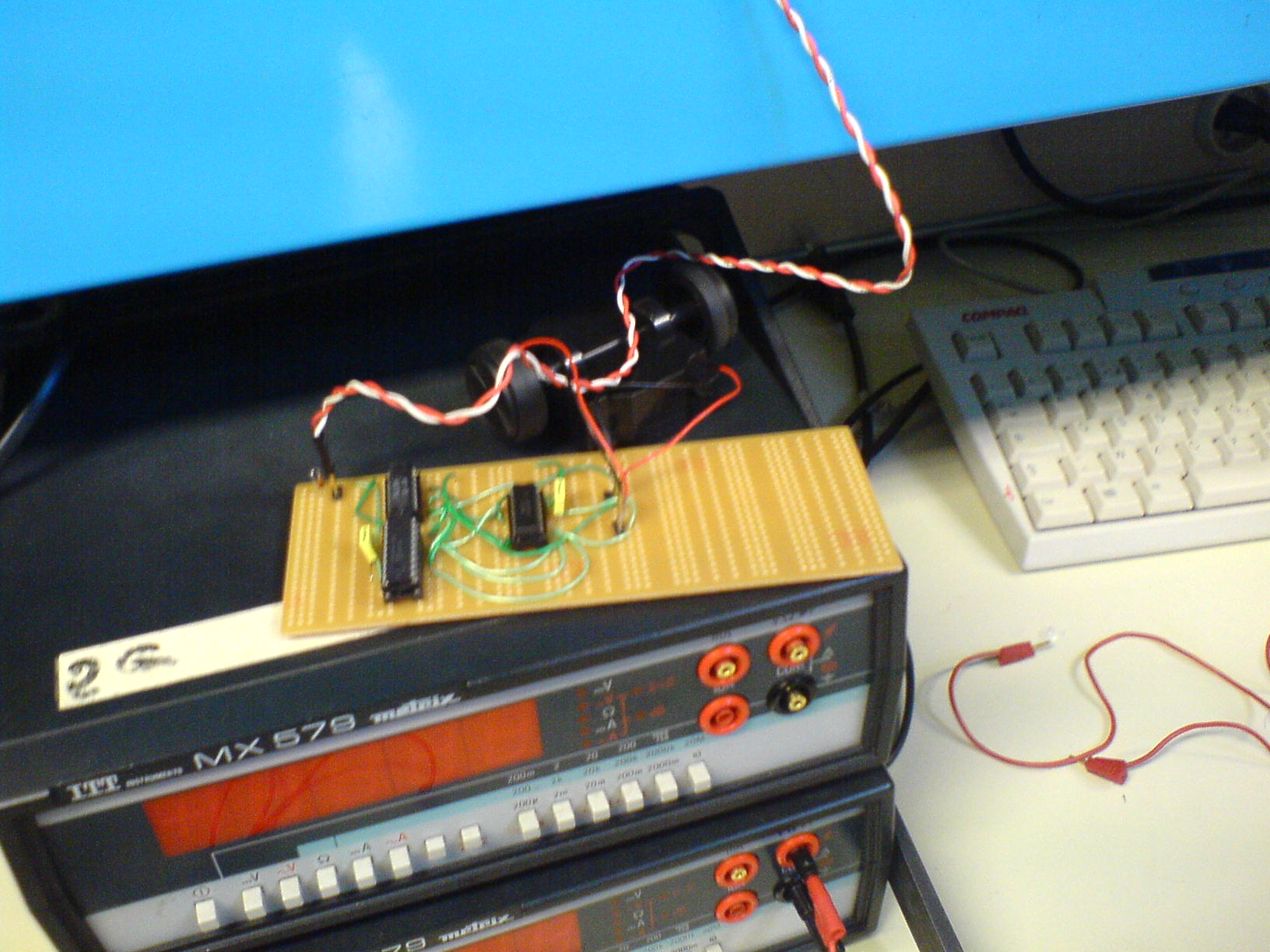
Afin
de vérifier que la plaque fonctionne correctement,nous avons
alimenté la plaque avec un générateur de courant
continu et mesuré les tensions aux bornes des trois supports
installés, après cela nous avons branché les
moteurs sur les broches prévues a cet effet et testé ces
deux moteurs avec un programme de test.
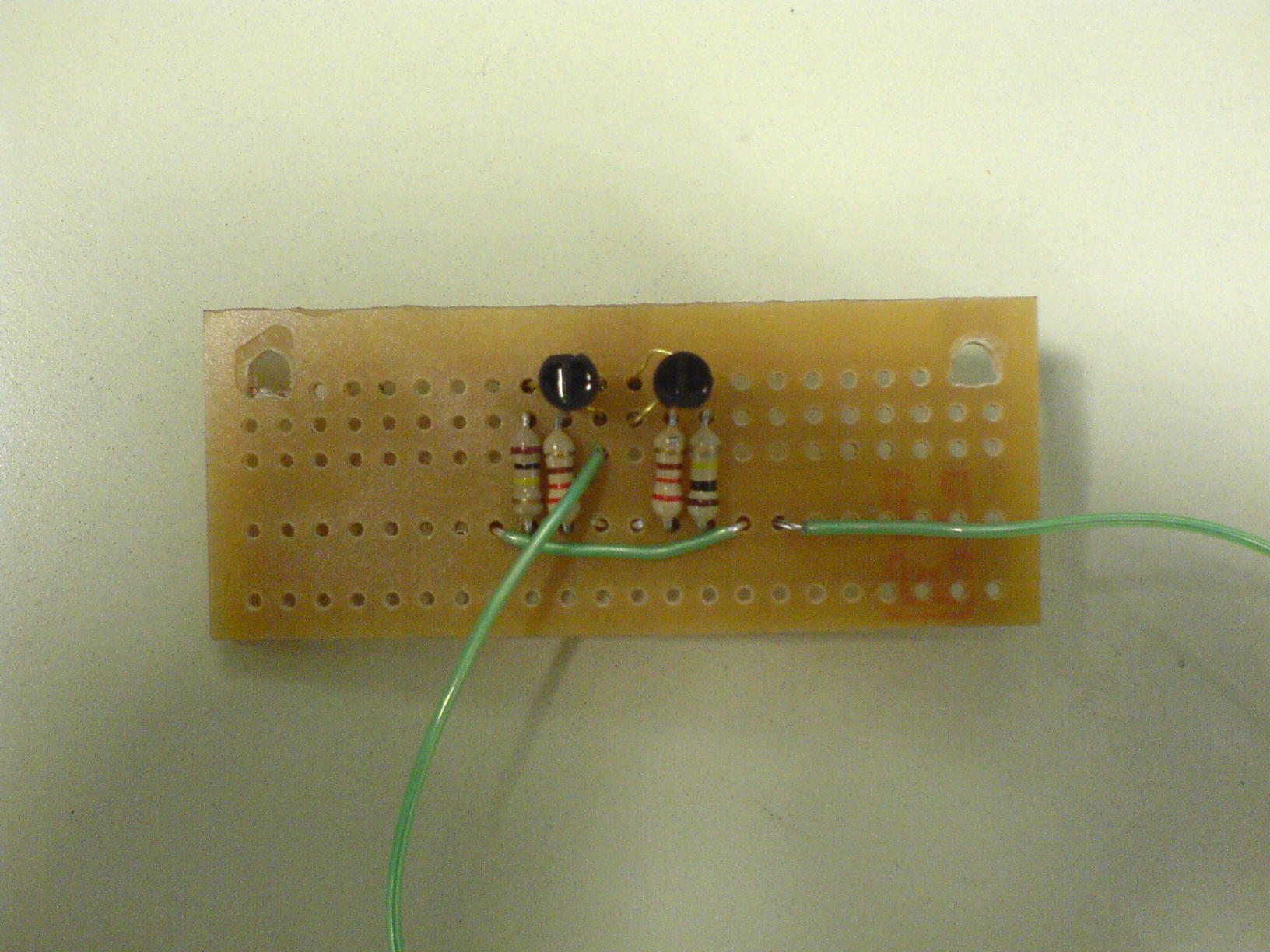
La carte capteurs est réalisée à partir
du schéma structurel présenté plus haut. Ainsi la seconde carte terminée, elle
est installée sur la partie avant du robot à l’aide de deux visses-écrous.
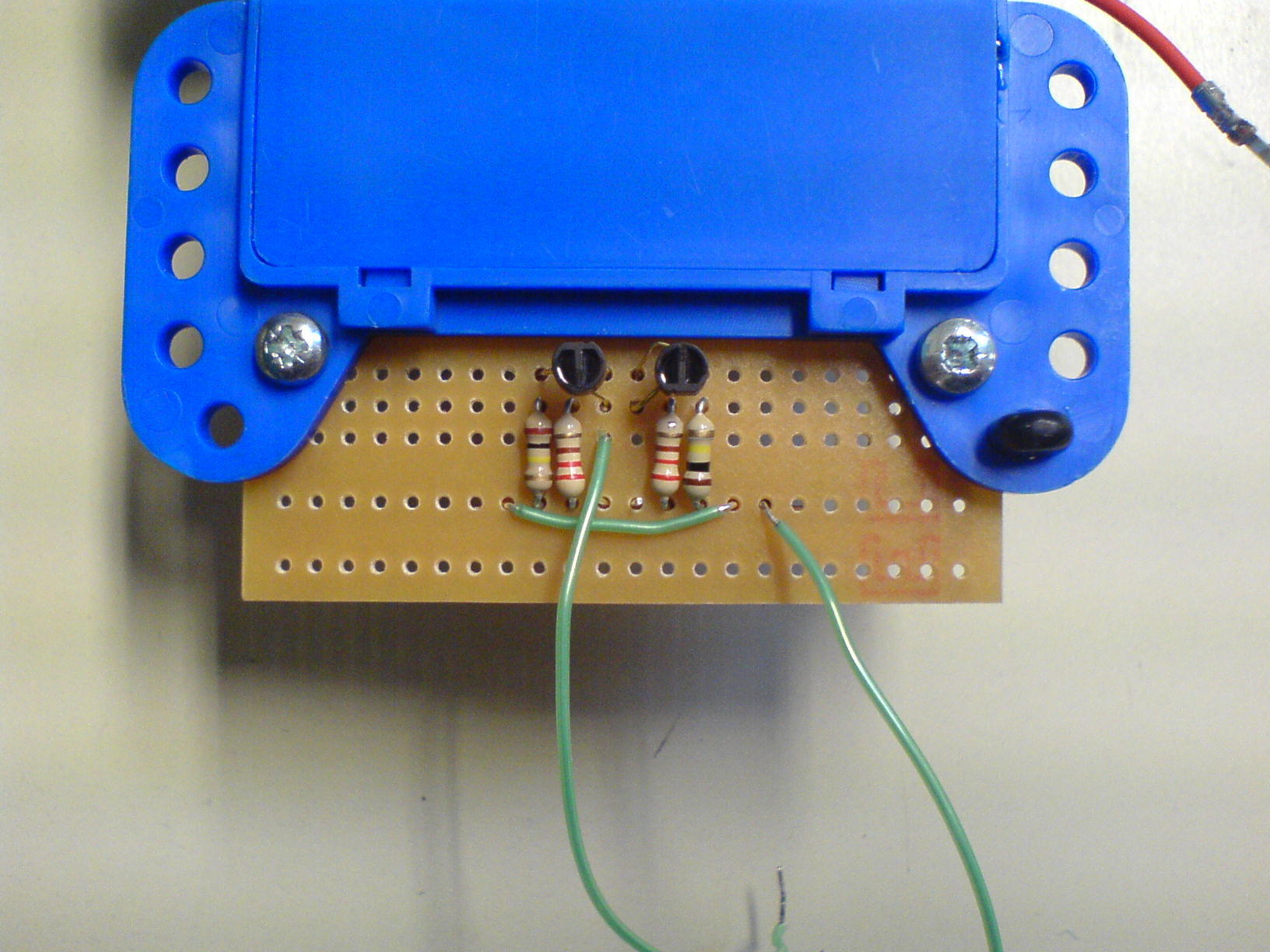
Quatre autres broches ont été ajoutées afin de relier facilement les deux plaques, deux de ces broches servent d'alimentations aux capteurs et les deux autre sont reliées au microcontrôleur pour la détection de la ligne noire.
Les câbles reliant les deux carte sont soudés sur la carte mère et sur l'autre carte sont installées de broches femelles permettant un branchement facile et rapide.
Lors des premiers tests du robot, les capteurs de
ligne étaient trop près. Ainsi, ceux-ci ne différenciaient pas la ligne blanche
de la ligne noire à cause d’une trop haute tension renvoyée lors de la
détection d’une ligne noire.
Afin de pouvoir utiliser différents programmes conçus par nos soins, il a été nécessaire d’ajouter deux autres broches. Le programme est alors choisi en fonction du cavalier.
| Sommaire |